Установка
Поскольку ROS - это мета-операционная система, вам необходимо выбрать ОС для использования. ROS поддерживает Debian, Ubuntu, Linux Mint, OS X, Fedora, Gentoo, openSUSE, Arch Linux и Windows (через виртуализацию Linux), но самыми популярными операционными системами являются Debian, Ubuntu и Linux Mint. В нашем учебнике мы будем использовать ОС Ubuntu. Для слабых компьютеров, рекомендуем использовать ОС Lubuntu (совместима с Ubuntu)
На сегодняшний день, актуальным дистрибутивом ROS является ROS Noetic Ninjemys http://wiki.ros.org/noetic этот дистрибутив мы и установим.
Оригинальная инструкция по установке ROS находится на сайте ROS https://www.ros.org/install/. За основу дальнейшей инструкции будет взята страница http://wiki.ros.org/melodic/Installation/Ubuntu.
Для установки ROS на Ubuntu существуют готовые пакеты, нам достаточно добавить репозиторий, содержащий пакеты ROS и установить их обычным для Linux способом.
Если на вашей платформе не существует подготовленных пакетов, то прийдется "собирать" все пакеты из исходного кода, что не сложно, но займет куда более продолжительное время.
Установка пакетов
Добавление репозитория пакетов ROS
Открываем окно терминала (программа terminal) (возможно Ctrl-Alt-T)
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
Добавление ключей
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
Обратите внимание, что ключ может измениться, поэтому уточните его на официальной Wiki странице http://wiki.ros.org/melodic/Installation/Ubuntu.
Обновление списка пакетов
Когда мы добавили и настроили репозиторий с пакетами ROS, мы должны обновить список пакетов доступных системе для установки. Также рекомендуется обновить все установленные пакеты Ubuntu до установки ROS.
sudo apt-get update && sudo apt-get upgrade -y
Установка пакетов ROS
На этапе знакомства с ROS, проще всего установить самую полную версию системы. Данный пакет автоматический установит все основные пакеты ROS, rqt, rviz, библиотеки 2D/3D симуляции, навигации и тп.
sudo apt install ros-noetic-desktop-full
Установка дополнительных пакетов
Если необходимо установить дополнительный пакет, то это можно сделать обычной утилитой установщиком apt-get. Например добавить пакет slam-gmapping можно командой.
sudo apt install ros-noetic-slam-gmapping
Поиск пакетов выполняется командой
apt search ros-noetic
Настройка после установки
Установка rosdep
Прежде чем использовать ROS, вам необходимо инициализировать rosdep. rosdep позволяет устанавливать системные зависимости для исходных кодов, который вы хотите скомпилировать и требуется для запуска некоторых основных компонентов в ROS.
sudo rosdep init
rosdep update
Настройка рабочего окружения
Настройка рабочих параметров ROS, происходит через установку переменных окружения (например пути библиотек, адреса серверов и тд). Эту операцию можно делать руками, но проще настроить их автоматический экспорт при запуске интерактивной оболочки bash.
Добавим переменные окружения ROS, для их автоматической установки при запуске bash:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
Если вы просто хотите загрузить переменные ROS в текущем сеансе, то вы можете ввести:
source /opt/ros/melodic/setup.bash
Если вы используете zsh вместо bash, то необходимо выполнить команду.
echo "source /opt/ros/noetic/setup.zsh" >> ~/.zshrc
source ~/.zshrc
Установка дополнительных пакетов для разработчиков
Если вы собираетесь самостоятельно разрабатывать или вносить изменения в пакеты, вам необходимо установить дополнительные пакеты.
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
Создание рабочего пространства
ROS использует специальную систему сборки под названием catkin. Чтобы использовать ее, вам необходимо создать и инициализировать папку рабочего пространства.
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
Первый запуск
Установка для ROS завершена, следующая команда запустит сервер (главную ноду) ROS. Закройте все окна терминала и откройте новое окно терминала.
roscore
Если ROS установлена верно, то мы увидим приблизительно такое сообщение при запуске:
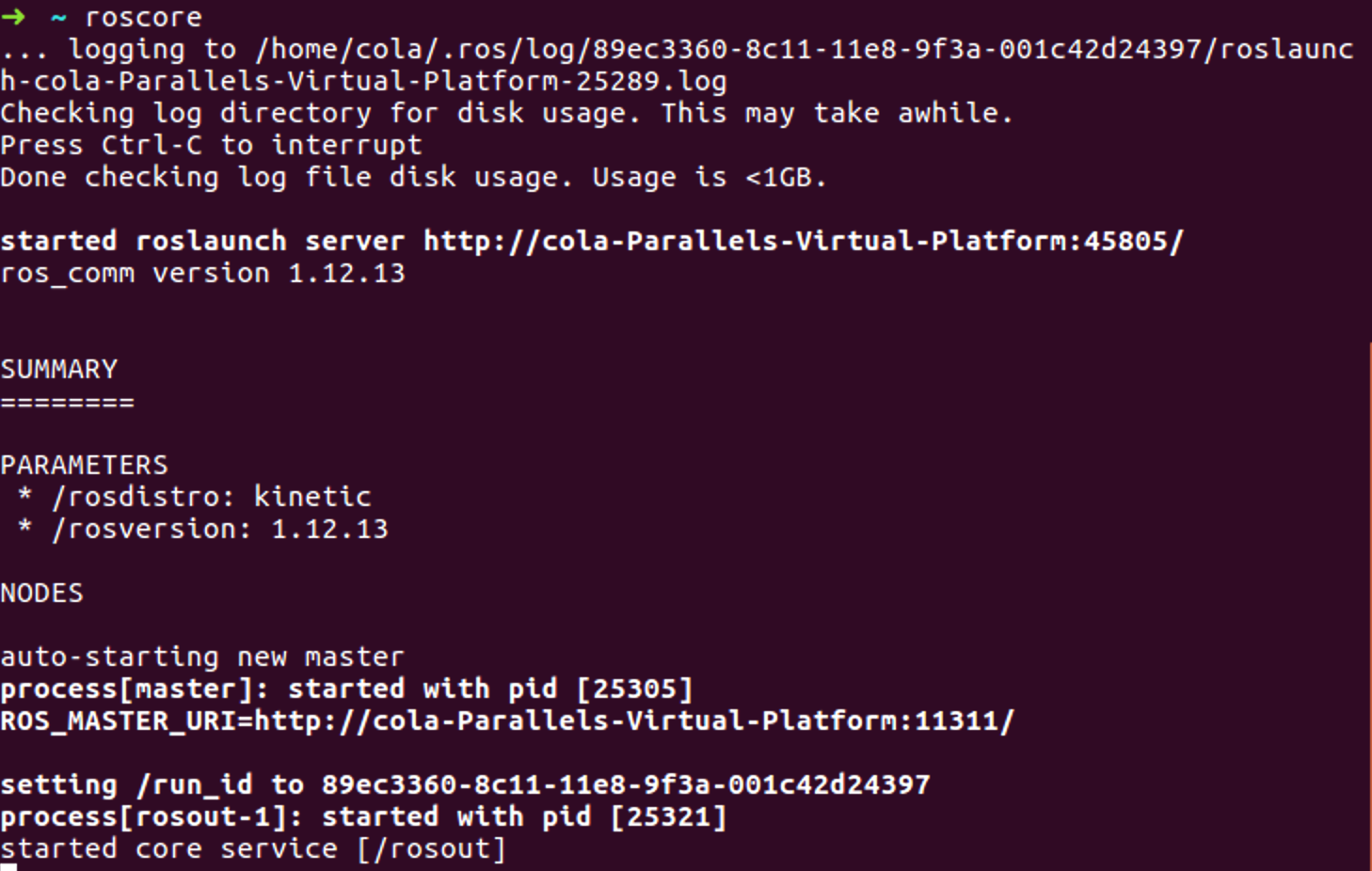
Для остановки roscore необходимо нажать Ctrl+C
Если вы хотите чтобы roscore запустился в фоновом режиме, то запустите его командой
roscore &