Внесение изменений в стандартные действия
Стандартные действия — это готовые сценарии, которые позволяют Робоголове реагировать на голосовые команды, показывать мультимедиа и выполнять простые движения. Но всегда возникает желание добавить чего-то своего: новую картинку, другую мелодию, изменить угол наклона головы или даже добавить дополнительный эффект.
Рассмотрим настройку стандартных действий на примере стандартного действия std_ears, которое вызывается по команде "Слушай, Робот! Покажи уши".
Любые изменения в стандартных действиях применяются "на лету", после сохранения изменений файлов. Если началось непредсказуемое поведение - запустите пакет robohead_controller в ручном режиме (см. далее).
1. Расположение файлов стандартных действий
Стандартные действия находятся в папке robohead_controller_actions пакета robohead_controller. Для std_ears перейдите в папку:
~/robohead_ws/src/robohead/robohead_controller/scripts/robohead_controller_actions/std_ears
В ней вы увидите три основных файла:
ears.png— картинка с ушами, которая выводится на экран;ears.mp3— аудиофайл, который воспроизводится через динамики;action.py— скрипт, описывающий всю логику действия: какие сообщения отправлять, какие сервисы вызывать и в какой последовательности.
Пример структуры:
std_ears/
├── ears.png
├── ears.mp3
└── action.py
2. Разбор скрипта action.py
Откройте файл action.py. Основной блок кода выглядит примерно так:
from robohead_controller_actions.main import *
def run(robohead_controller:RoboheadController, cmds:str):
'''
Эта функция вызывается, когда вы произносите «Слушай, Робот! Покажи уши».
Все инструкции ниже выполняются последовательно.
'''
# 1. Получаем путь до текущей папки, чтобы легко ссылаться на медиа-файлы
script_path = os.path.dirname(os.path.abspath(__file__)) + '/'
# 2. Отправляем картинку ушей на экран
msg = PlayMediaRequest() # Создаем сообщение для вызова сервиса PlayMedia пакета display_driver
msg.is_blocking = 0 # Не ждём завершения воспроизведения
msg.is_cycled = 0 # Воспроизведение не зациклено
msg.path_to_file = script_path + 'ears.png' # Формируем абсолютный путь до файла, который хотим вывести на экран
robohead_controller.display_driver_srv_PlayMedia(msg) # Вызываем сервис PlayMedia с сформированным сообщением
# 3. Воспроизводим звук (mp3-файл) через динамики
msg = PlayAudioRequest() # Создаем сообщение для вызова сервиса PlayAudio пакета speakers_driver
msg.path_to_file = script_path + 'ears.mp3' # Формируем абсолютный путь до файла, который хотим воспроизвести через динамики
msg.is_blocking = 0 # Не ждём завершения воспроизведения
msg.is_cycled = 0 # Воспроизведение не зациклено
robohead_controller.speakers_driver_srv_PlayAudio(msg) # Вызываем сервис с сформированным сообщением
# 4. Меняем положение шеи: задаём горизонтальный и вертикальный углы
msg = NeckSetAngleRequest() # Создаем сообщение для вызова сервиса NeckSetAngle пакета neck_driver
msg.horizontal_angle = 0 # Положение шеи по горизонтали 0
msg.vertical_angle = 30 # Положение шеи по вертикали 30
msg.duration = 1 # Длительность, за которую необходимо достичь заданного положения 1 секунда
msg.is_blocking = 0 # Не ждём, пока шея полностью встанет в позицию
robohead_controller.neck_driver_srv_NeckSetAngle(msg) # Вызываем сервис с сформированным сообщением
# 5. Меняем угол ушей: левое −30°, правое +30°
msg = EarsSetAngleRequest() # Создаем сообщение для вызова сервиса EarsSetAngle пакета ears_driver
msg.left_ear_angle = -30 # Левое ухо в положение -30
msg.right_ear_angle = 30 # Правое ухо в положенеи 30
robohead_controller.ears_driver_srv_EarsSetAngle(msg) # Вызываем сервис с сформированным сообщением
# 6. Добавляем «игривое» подёргивание ушами 5 раз
k=-1 # Переменная, меняющая направление положения ушей
for _ in range(5): # Цикл, повторяющий подергивания ушей 5 раз
rospy.sleep(0.5) # Ждём полсекунды
msg.left_ear_angle = -30*k # Левое ухо в положение -30*k
msg.right_ear_angle = 30*k # Правое ухо в положение 30*k
k*=-1 # Меняем направление ушей
robohead_controller.ears_driver_srv_EarsSetAngle(msg) # Вызываем сервис с сформированным сообщением
3. Примеры пользовательских изменений
Ниже приведены несколько примеров, как разнообразить действие std_ears без глубокого изменения логики.
3.1 Замена медиа-ресурсов
- Вывод видео вместо статичного изображения
- Поместите свой видеофайл (например,
video.mp4) в ту же папку. - В файле
action.pyизмените строчку, где формируется путь до медиафайла:
После этого скажите голосом: "Слушай, Робот! Покажи уши", и робот покажет видео на экране.- msg.path_to_file = script_path + 'ears.png'
+ msg.path_to_file = script_path + 'video.mp4' - Поместите свой видеофайл (например,
Важно Обратите внимание, что размер видео должен быть строго 1080х1080 пикселей!
- Изменение звукового сопровождения
Бывает хочется, чтобы Робоголова не просто проигрывала короткий звук «Ухи мои ухи», а, например, сначала здоровалась. Для этого:
- Сохраните файлы
hello.mp3иnew_sound.mp3с нужным вам звуком в папке стандартного действия. - Вставьте в код два блока «Воспроизведение звука», например:
# 1. Сначала приветствие
msg = PlayAudioRequest()
msg.path_to_file = script_path + 'hello.mp3'
msg.is_blocking = 1 # Ждём, пока закончится приветствие
msg.is_cycled = 0
robohead_controller.speakers_driver_srv_PlayAudio(msg)
# 2. Затем звук для ушей
msg = PlayAudioRequest()
msg.path_to_file = script_path + 'new_sound.mp3'
msg.is_blocking = 0
msg.is_cycled = 0
robohead_controller.speakers_driver_srv_PlayAudio(msg) - Обратите внимание, что
is_blocking = 1означает ожидание завершения воспроизведения аудио перед продолжением выполнения скрипта.
3.2 Настройка положения шеи
-
Изменение угла обзора
Для более выразительной реакции можно поднять голову выше или опустить:- msg.horizontal_angle = 0
- msg.vertical_angle = 30
+ msg.horizontal_angle = 15 # Повернуть голову вправо на 15°
+ msg.vertical_angle = -20 # Опустить голову вниз на 20° -
Изменение скорости движения
Параметрdurationотвечает за время выполнения движения. Меньшее значение — более резкое движение:- msg.duration = 1
+ msg.duration = 0.5 # Шея повернется быстрее: за 0.5 секунды -
Добавление паузы перед движением
Чтобы голосовая команда сначала воспроизводила звук и изображение, а через секунду двигала шею:rospy.sleep(1) # Пауза 1 секунда
msg = NeckSetAngleRequest()
# ...3.3 Настройка «анимации» ушей
По умолчанию уши подергиваются 5 раз с интервалом 0.5 секунды. Вот несколько примеров изменений:
-
Увеличить количество повторений
Изменитеrange(5)на большее значение, например:- for _ in range(5):
+ for _ in range(10): # Подергивание 10 раз -
Увеличить интервал
Чтобы подергивания были медленнее (интервал 1 секунда):- rospy.sleep(0.5)
+ rospy.sleep(1) -
Сложная анимация
Можно задать последовательность углов в списке:angles = [-30, 0, 30, 0, -30] # Последовательность позиций
for angle in angles:
msg.left_ear_angle = -angle
msg.right_ear_angle = angle
robohead_controller.ears_driver_srv_EarsSetAngle(msg)
rospy.sleep(0.4)
4. Запуск пакета robohead_controller в ручном режиме
Для тестирования бывает удобно запустить пакет robohead_controller в ручном режиме, чтобы видеть появляющиеся ошибки и информацию для отладки (например, если в скрипте вы что-то выводили через функцию print()).
Шаг 1. Остановка Ubuntu-сервиса
По-умолчанию, пакет robohead_controller и все зависимости запускаются автоматически при загрузке Робоголовы при помощи Ubuntu-сервиса. Для отладки и запуска пакета в ручном режиме его необходимо остановить
sudo systemctl stop robohead.service
Шаг 2. Запуск пакета вручную
Запустите пакет отдельно через launch-файл:
roslaunch robohead_controller robohead_controller_py.launch
На экране терминала должен появиться примерно следующий вывод:
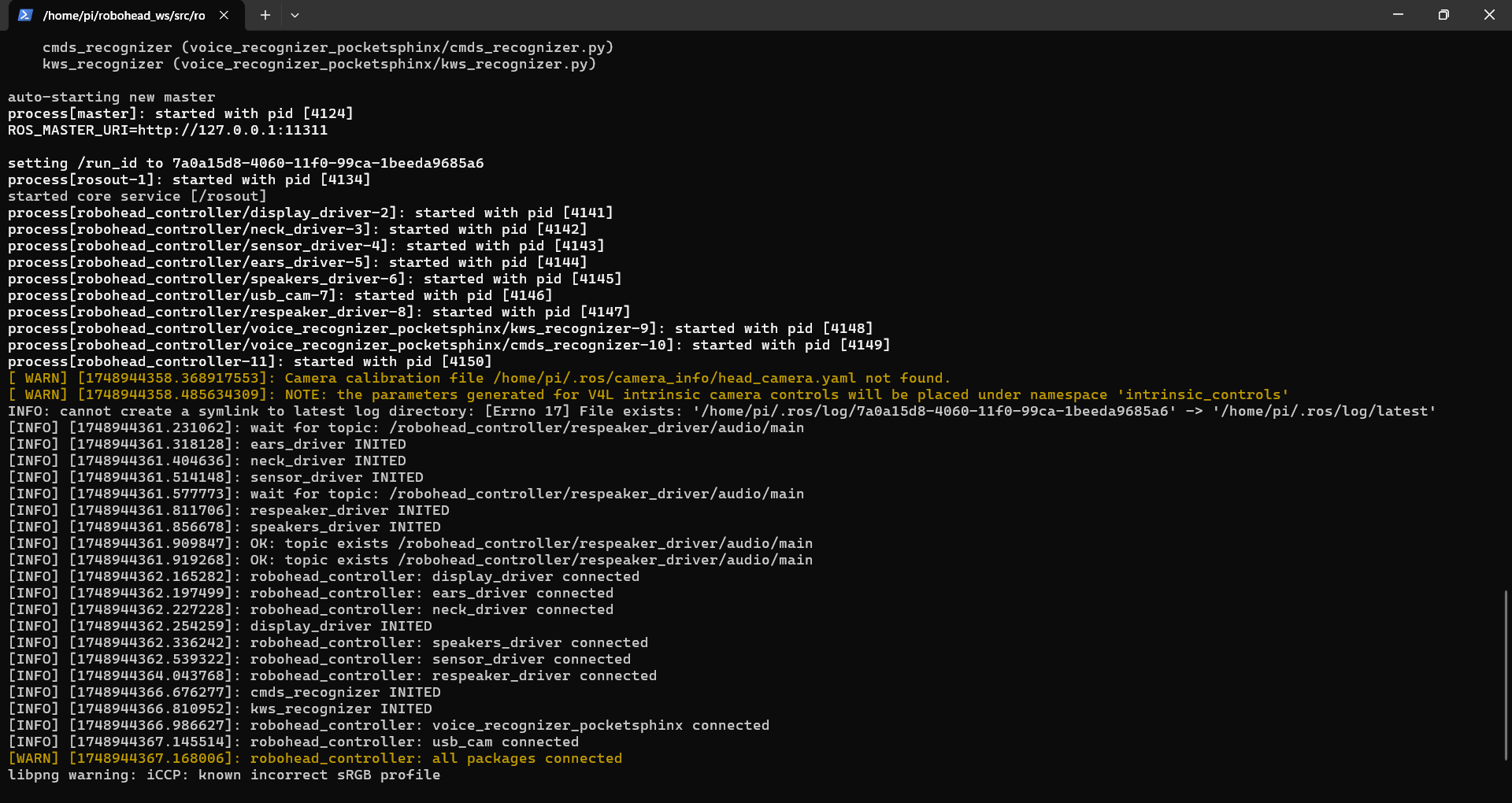
5. Отладка команд
В этом шаге описано как запускать стандартные действия, не произнося каждый раз голосом нужную команду.
Отлаживать команды можно как при автоматически запущенном robohead_controller (через Ubuntu-сервис), так и когда он запущен в ручном режиме (этот вариант предпочтительнее для отладки, так как видны все возникающие ошибки)
Откройте новое окно терминала, подключитесь к Робоголове и опубликуйте "покажи уши" в топик /robohead_controller/voice_recognizer_pocketsphinx/cmds_recognizer/commands
# Запустите в отдельном терминале
rostopic pub /robohead_controller/voice_recognizer_pocketsphinx/cmds_recognizer/commands std_msgs/String "data: 'покажи уши'"
После публикации команды Робоголова должна выполнить стандартное действие "Покажи уши".
Аналагично можно запускать и другие стандартные действия.