Написание своего действия для robohead_controller
В этом разделе рассмотрим, как добавить собственное действие "Улыбнись", вызываемое голосовой командой, в систему управления Робоголовы (robohead_controller). Процесс состоит из трёх этапов:
- Добавление новой голосовой команды в словарь распознавания речи
- Создание скрипта действия
- Настройка конфигурации пакета robohead_controller

Каждый шаг подробно описан ниже.
1. Добавление новой голосовой команды в словарь распознавания речи
- Откройте конфиг-файл ASR-ноды:
nano ~/robohead_ws/src/robohead2/robohead_controller/config/speech_recognizer_asr.yaml
- Добавьте в
commandsкоманду "Улыбнись". Получится примерно следующее:commands:- 'покажи уши'- 'покажи левое ухо'- 'покажи правое ухо'- 'поздоровайся'- 'сделай фото'- 'повтори за мной'- 'ответь на вопрос'- 'следи за шариком'- 'покажи напряжение'- 'улыбнись'
2. Создание скрипта действия
Теперь, когда новая команда распознаётся речевым движком, необходимо написать сам код, который будет выполняться при активации «улыбнись». Для этого нам также понадобятся 2 файла:
Картинка, выводимая на экран. smile.png
Аудио-файл, воспроизводимый через динамики. smile.mp3
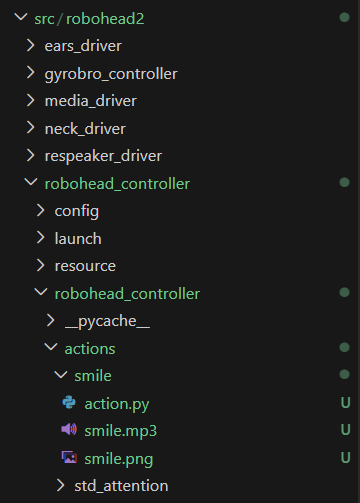
2.1 Структура папки скрипта и медиа-файлов
Перейдите в директорию, где хранятся скрипты действий:
cd ~/robohead_ws/src/robohead2/robohead_controller/robohead_controller/actions
Создайте папку smile для нового действия
mkdir smile
В папке smile создайте файл action.py. Переместите в эту же папку два медиа-файла: изображение улыбки (smile.png) и звуковой файл с «улыбкой» (smile.mp3). Если вы используете удалённое подключение (SFTP или VSCode Remote), просто перетащите эти файлы в папку smile.
2.2 Написание основного кода (action.py)
Откройте файл action.py и вставьте следующий код, который реализует действие «улыбки»:
# smile
# действие, выполняющееся при команде "Улыбнись"
# Импорты нужны для автоподстановок кода при работе через VSCode
from __future__ import annotations
from typing import TYPE_CHECKING
import os
if TYPE_CHECKING:
from robohead_controller.controller import RoboheadController
import threading
def run(
controller: RoboheadController, action_name: str, cancel_event: threading.Event
):
"""
Args:
controller: Ссылка на контроллер
action_name: Команда, по которой было вызвано действие
cancel_event: threading.Event для проверки отмены
"""
action_dir = os.path.dirname(os.path.abspath(__file__)) # Путь к папке со скриптом, обычно это:
# /home/pi/robohead_ws/build/robohead_controller/robohead_controller/actions/std_ears
logger = controller.get_logger() # logger - объект логирования, через него можно печатать в консоль
logger.info(f"[{action_name}] start") # выводим в терминал "[std_ears] start"
# Выводим картинку smile.png без зацикливания воспроизведения (это же картинка) и блокирования вызова
controller.media_driver.play_display(
cancel_event=cancel_event,
video_path=os.path.join(action_dir, "smile.png"),
loop=False,
block=False,
)
# Получаем угол, откуда пришёл голос и ограничиваем его в диапазоне от -30 до +30
h_angle = max(-30, min(30, -controller.respeaker_driver.doa)) # type: ignore
# Поворачиваем голову в сторону, откуда пришёл звук
controller.neck_driver.set_angle(
cancel_event=cancel_event,
horizontal=h_angle, # Поворот в сторону звука
vertical=30, # Голова приподнята вверх
duration=1.5, # Длительность достижения положения 1.5 секунд
block=False, # Неблокирующий вызов
)
controller.ears_driver.set_angle(
cancel_event=cancel_event,
left=-90, # Левое ухо назад на 90 градусов
right=90, # Правое ухо вперед на 90 градусов
duration=0.5, # Достижение положения на 0.5 секунды
block=False, # Неблокирующий вызов
)
# Проигрываем звук smile.mp3 без зацикливания воспроизведения и блокирования вызова
controller.media_driver.play_audio(
cancel_event=cancel_event,
audio_path=os.path.join(action_dir, "smile.mp3"), # Воспроизводим аудио-файл "smile.mp3"
loop=False, # Воспроизведение без зацикливания
block=True, # Блокирующий вызов
)
logger.info(f"[{action_name}] finish") # выводим в терминал "[std_ears] finish"
Что происходит в коде:
- controller.media_driver.play_display(...): выводит на экран робота изображение
smile.png - controller.neck_driver.set_angle(...): поворачивает голову к говорящему, используя угол
controller.respeaker_driver.doa, возвращаемый микрофоном ReSpeaker. Ограничение угла в диапазоне от −30° до +30° обеспечивает плавность и безопасность движения. - controller.ears_driver.set_angle(...): разворачивает уши в стороны, устанавливая углы на −90° (левое ухо) и +90° (правое ухо), что усиливает впечатление «улыбающегося» робота.
- controller.media_driver.play_audio(...): приостанавливает дальнейшие действия до окончания воспроизведения аудиофайла
smile.mp3, чтобы завершить «улыбку» звуковым сопровождением.
3. Настройка конфигурации пакета robohead_controller
Осталось связать голосовую команду с написанным скриптом. Для этого редактируем файл robohead_controller/config/robohead_controller.yaml.
3.1 Открытие конфигурационного файла
Файл находится по пути:
~robohead_ws/src/robohead2/robohead_controller/config/robohead_controller.yaml
Откройте его в любом удобном редакторе.
3.2 Добавление новой команды в словарь robohead_controller_actions_match
Найдите секцию, отвечающую за сопоставление распознанных команд с соответствующими скриптами:
actions_match: >
{
"std_startup" : "std_startup/action.py",
"std_wait": "std_wait/action.py",
"std_low_bat": "std_low_bat/action.py",
"std_attention": "std_attention/action.py",
"поздоровайся": "std_greeting/action.py",
"покажи уши": "std_ears/action.py",
"следи за шариком" : "std_ball_tracker/action.py",
"сделай фото" : "std_make_photo/action.py",
"покажи левое ухо" : "std_left_ear/action.py",
"покажи правое ухо" : "std_right_ear/action.py",
"повтори за мной" : "std_echo/action.py",
"ответь на вопрос" : "std_llm/action.py",
"покажи напряжение" : "std_show_voltage/action.py",
"громче" : "std_volume_up/action.py",
"тише" : "std_volume_down/action.py",
# Добавляем связку для команды «улыбнись»
"улыбнись" : "smile/action.py"
}
Совет: Следите за правильными кавычками и отсутствием лишних запятых, чтобы YAML-файл оставался рабочим.
4. Применение изменений
Для применения изменений в конфигурационных файлах (движка распознавания речи и robohead_controller.yaml) требуется перезапуск пакета robohead_controller. Сделать это можно тремя способами:
- Остановить Ubuntu-сервис и запустить пакет в ручном режиме для отладки (наиболее предпочтительный вариант, так как можно сразу увидеть появляющиеся ошибки)
- Перезапустить Ubuntu-сервис (удобен для проверки работы того, как будет работать Робоголова после перезагрузки питания)
- Физически перезагрузить Робоголову через кнопку питания (наименее удобный вариант, посколько придется ждать загрузки всей системы заново)
Далее проделайте один из шагов 4.1 или 4.2, или перезагрузите голову.
4.1 Запуск в режиме отладки
Остановите Ubuntu-сервис (в этот момент пакет robohead_controller и все зависимости автоматически остановятся)
# Останавливаем сервис robohead
sudo systemctl stop robohead.service
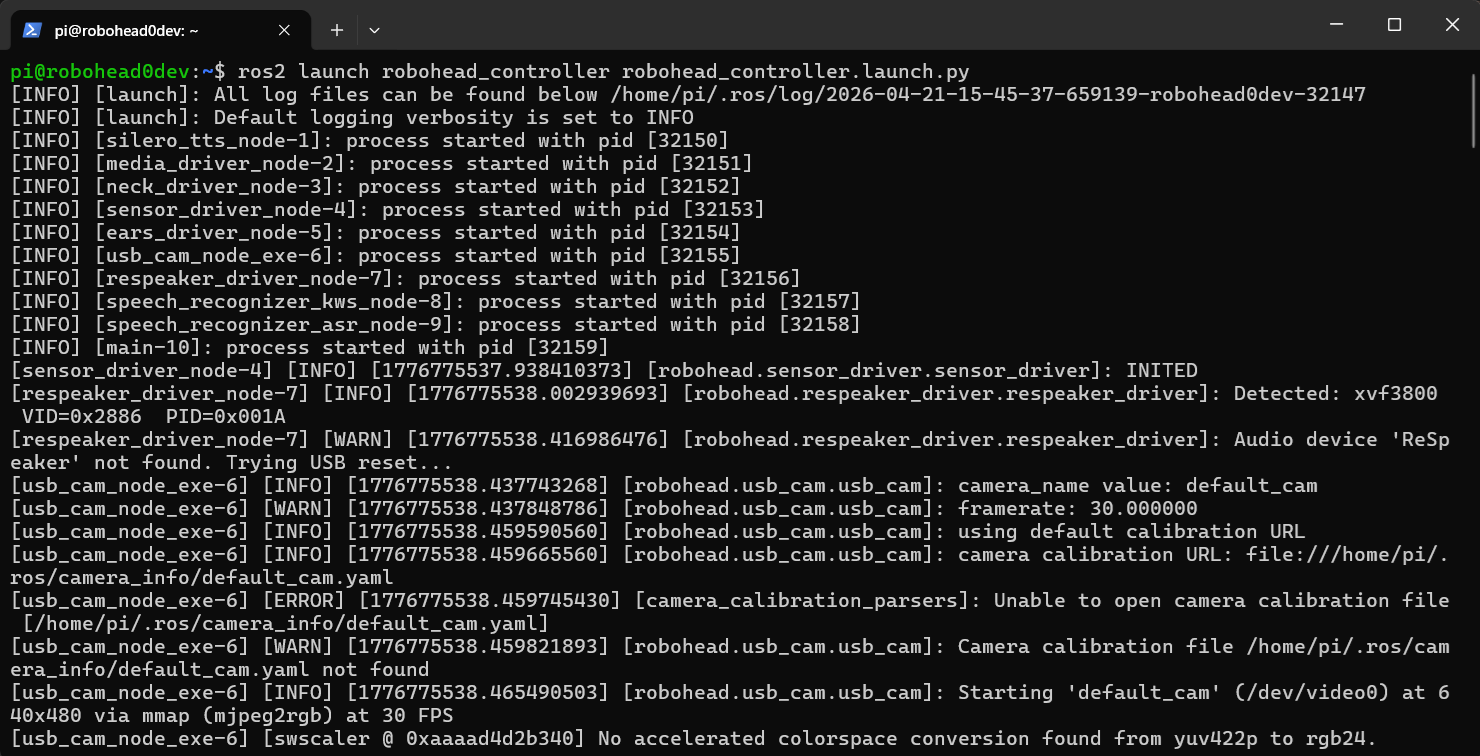
Запустите robohead_controller и все зависимости в ручном режиме:
ros2 launch robohead_controller robohead_controller.launch.py
На экране терминала должен появиться примерно следующий вывод:
4.2 Перезапуск Ubuntu-сервиса
# Останавливаем сервис robohead, если не был остановлен
sudo systemctl stop robohead.service
# Запускаем сервис заново
sudo systemctl start robohead.service
Для удобства вместо этих двух комманд можно использовать:
sudo systemctl restart robohead.service
Если всё прошло успешно, новый скрипт будет загружен, и Робоголова сможет реагировать на команду «улыбнись».
5. Итоговое поведение
После выполнения всех вышеописанных шагов, при произнесении команды «Слушай, Робот! Улыбнись!» произойдёт следующее:
- Голова робота определит направление голоса и плавно повернётся к говорящему (±30° по горизонтали, +30° по вертикали).
- Уши робота развернутся в стороны (левое ухо на −90°, правое на +90°), создавая эффект «улыбки».
- На экран выведется изображение
smile.png, усиливая визуальное восприятие «улыбки». - Проиграется аудиофайл
smile.mp3, добавляя звук к «улыбающемуся» роботу.
Таким образом, вы получите полностью работающее и наглядное голосовое действие, которое легко редактировать и расширять в дальнейшем.
6. Отладка команд
В этом шаге описано как запускать стандартные действия, не произнося каждый раз голосом нужную команду.
Отлаживать команды можно как при автоматически запущенном robohead_controller (через Ubuntu-сервис), так и когда он запущен в ручном режиме (этот вариант предпочтительнее для отладки, так как видны все возникающие ошибки)
Откройте новое окно терминала, подключитесь к Робоголове. Далее нужно опубликовать Робоголове ключевую фразу:
ros2 topic pub /robohead/speech_recognizer/kws/wake_phrases std_msgs/msg/String "data: 'слушай робот'" --once
И, пока не прошел таймаут, успеть опубликовать команду, которую нужно запустить:
ros2 topic pub /robohead/speech_recognizer/asr/commands std_msgs/msg/String "data: 'улыбнись'" --once
После публикации команды Робоголова должна выполнить стандартное действие "Покажи уши".
Аналагично можно запускать и другие стандартные действия.
В
.../kws/wake_phrasesможно публиковать что угодно - фиксируется факт нахождения ключевой фразы В.../asr/commandнужно публиковать команды, которые описаны вactions_matchвrobohead_controller/config/robohead_controller.yaml.