Пакет robohead_controller
Общее описание
Пакет robohead_controller — центральный управляющий пакет робоголовы. Он связывает все драйверы (уши, шея, дисплей, аудио, микрофон, камера, датчик батареи, распознавание речи) в единую систему с голосовым управлением и автоматическим поведением.
Контроллер реализует:
- Подключение ко всем драйверам через ROS2 сервисы и топики.
- Голосовое управление по схеме: wake phrase → распознавание команды → выполнение действия.
- Систему действий (actions) — модульные Python-скрипты, описывающие поведение робота.
- Мониторинг батареи с автоматической реакцией на низкий заряд.
- Быстрые команды — команды, выполняемые без wake phrase (громче, тише и т.д.).
Структура пакета
robohead_controller
├── config # Конфигурационные файлы
│ ├── ears_driver.yaml
│ ├── media_driver.yaml
│ ├── neck_driver.yaml
│ ├── respeaker_driver.yaml
│ ├── robohead_controller.yaml # Основной конфиг-файлы
│ ├── sensor_driver.yaml
│ ├── silero_tts.yaml
│ ├── speech_recognizer_asr.yaml
│ └── speech_recognizer_kws.yaml
├── launch
│ ├── dependencies.launch.py # Launch-файл запуска зависимостей (все driver-пакеты)
│ └── robohead_controller.launch.py # Launch-файл запуска пакета
├── package.xml
├── README.md
├── resource
│ └── robohead_controller
├── robohead_controller
│ ├── actions # Действия
│ │ ├── std_attention # Стандартное действие "Внимание"
│ │ │ ├── action.py
│ │ │ ├── attention.gif
│ │ │ ├── attention.mp3
│ │ │ ├── attention.mp4
│ │ │ ├── attention.png
│ │ │ └── __pycache__
│ │ │ └── action.cpython-312.pyc
│ │ ├── std_ball_tracker
│ │ │ ├── action.py
│ │ │ ├── calibrate_voice.mp3
│ │ │ ├── finish_voice.mp3
│ │ │ └── __pycache__
│ │ │ └── action.cpython-312.pyc
│ │ ├── std_ears
│ │ ├── std_echo
│ │ ├── std_greeting
│ │ ├── std_left_ear
│ │ ├── std_llm
│ │ ├── std_low_bat
│ │ ├── std_make_photo
│ │ ├── std_right_ear
│ │ ├── std_show_voltage
│ │ ├── std_startup
│ │ ├── std_wait
│ │ ├── std_volume_down # Быстрое действие на команду "Тише"
│ │ │ ├── action.py
│ │ │ └── set_vol.mp3
│ │ └── std_volume_up # Быстрое действие на команду "Громче"
│ │ ├── action.py
│ │ ├── max_vol.mp3
│ │ └── set_vol.mp3
│ ├── controller.py # Файл с главным классом RoboheadController
│ ├── core
│ │ ├── action_manager.py # Управление запуском действий
│ │ ├── battery_monitor.py # Мониторинг состояния АКБ
│ │ ├── commander.py # Переключение состояний: Ожидание ключевой фразы, распознавание команд
│ ├── drivers # Коннекторы для driver-пакетов
│ │ ├── ears_driver.py
│ │ ├── media_driver.py
│ │ ├── neck_driver.py
│ │ ├── respeaker_driver.py
│ │ ├── sensor_driver.py
│ │ ├── silero_tts.py
│ │ ├── speech_recognizer_asr.py
│ │ ├── speech_recognizer_kws.py
│ │ └── usb_cam.py
│ ├── __init__.py
│ ├── main.py # Точка входа
├── setup.cfg
├── setup.py
└── test
├── test_copyright.py
├── test_flake8.py
└── test_pep257.py
Автоматический запуск
- Пакет
robohead_controllerстартует автоматически при загрузке устройства.
Для отключения автозапуска используйте:
sudo systemctl stop robohead.service
- Запуск этого пакета инициирует старты всех зависимых ROS-пакетов (см.
launch/robohead_controller_py.launchиlaunch/dependencies.launch).
Action-скрипты
При распознавании стандартных голосовых команд вызывается соответствующий action-скрипт:
| Скрипт | Описание команды |
|---|---|
std_startup | Действие при запуске |
std_wait | Ожидание ключевой фразы |
std_attention | «Слушай, Робот!» |
std_ball_tracker | «Следи за шариком» |
std_ears | «Покажи уши» |
std_left_ear | «Покажи левое ухо» |
std_right_ear | «Покажи правое ухо» |
std_greeting | «Поздоровайся» |
std_make_photo | «Сделай фото» |
std_echo | "Повтори за мной" |
std_llm | "Ответь на вопрос" |
std_low_bat | Низкий заряд — блокирование других скриптов |
Расположение:
robohead_controller/robohead_controller/actions/<script_name>/
Каждый скрипт содержит код action.py и мультимедиа (картинки, аудио, видео). Для замены медиа без изменения кода просто замените файл в папке скрипта, сохранив имя и расширение.
Конфигурация параметров устройства
Основные параметры для подключенных аппаратных компонентов находятся в папке robohead_controller/config/:
media_driver.yaml— настройка параметров дисплеяears_driver.yaml— настройка параметров ушных сервоприводовneck_driver.yaml— настройка параметров шейных сервоприводовrespeaker_driver.yaml— настройка параметров микрофонного массиваsensor_driver.yaml— настройка параметров датчика АКБsilro_tts.yaml- настройка параметров tts (Text to Speech) пакета Silerospeech_recognizer_asr.yaml- настройка параметров пакета speech_recognizer для свободного распознавания и распознавания по грамматикеspeech_recognizer_kws.yaml- настройка параметров пакета speech_recognizer для ключевых слов (wake_phrases) и быстрых команд (fast_commands)robohead_controller.yaml- главный конфигурационный файл пакета robohead_controller
Настройка соответствия "голосовая команда - action-скрипт" задается в файле config/robohead_controller.yaml.
TODO проверить ссылку
Подробнее про настройку параметров написано здесь ->
Основной цикл работы
Компоненты ядра
main.py — Точка входа
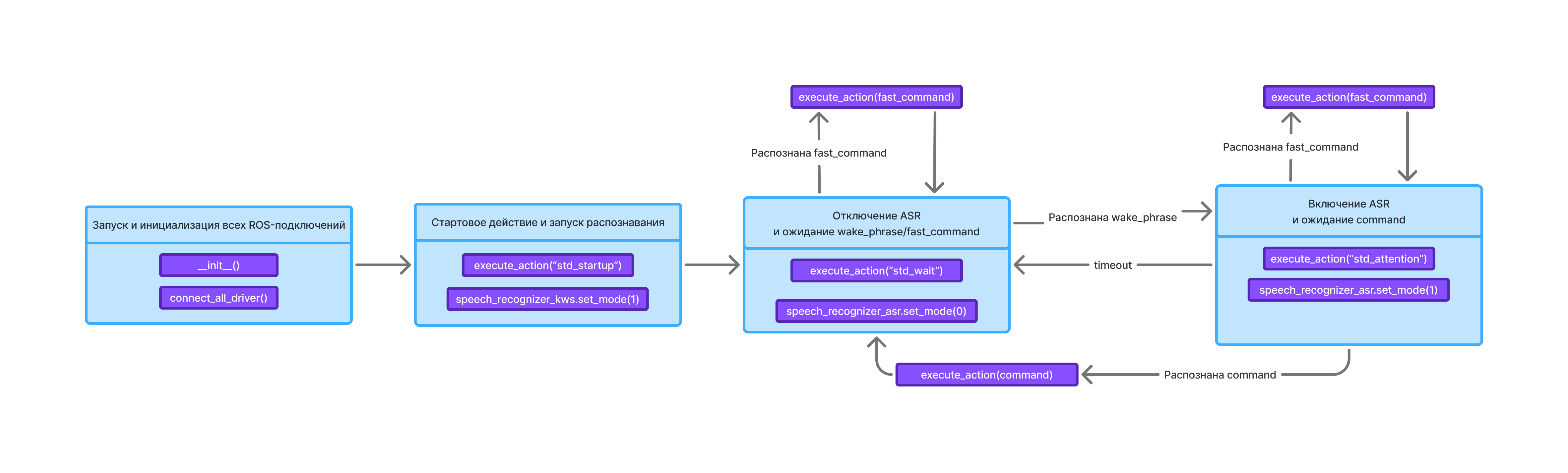
Создаёт экземпляр RoboheadController, подключает все драйверы, запускает стартовое действие и MultiThreadedExecutor для параллельной обработки колбэков.
controller.py — Главный класс
Класс RoboheadController (наследник rclpy.Node):
- Хранит экземпляры всех коннекторов драйверов.
- Хранит очереди событий:
queue_wake_phrases,queue_commands,queue_fast_commands. - Предоставляет метод
sleep(cancel_event, duration)для использования в действиях (с поддержкой отмены). - Загружает маппинг
actions_matchиз конфига (имя команды → путь к Python-скрипту). - Флаг
is_allow_workуправляетсяBatteryMonitor.
action_manager.py — Менеджер действий
Управляет запуском, отменой и изоляцией действий:
-
execute_action(name:str, on_complete: Optional[str], cancelling:bool)— запуск действия:- Если
cancelling=True— отменяет текущее действие перед запуском нового (обычное действие). - Если
cancelling=False— НЕ отменяет текущее действие перед запуском (быстрое действие). - Действие выполняется в отдельном daemon-потоке.
- После успешного завершения может автоматически запустить действие
on_complete.
- Если
-
Изоляция ошибок — ошибки в действиях логируются, но не приводят к падению контроллера.
-
Отмена — через
threading.Event. Действие должно периодически проверятьcancel_event.is_set(). Еслиcancel_event.is_set()==True, то действие должно завершиться.
battery_monitor.py — Мониторинг батареи
Проверяет напряжение батареи каждые 0.5 секунды:
| Условие | Действие |
|---|---|
voltage < low_voltage_threshold и работа разрешена (is_allow_work == True) | Запрещает работу (is_allow_work = False), запускает std_low_bat |
voltage ≥ (threshold + hysteresis) и работа запрещена (is_allow_work == False) | Разрешает работу (is_allow_work = True), запускает std_wait |
Гистерезис предотвращает частое переключение при напряжении вблизи порога.
commander.py — Обработчик команд
Работает с частотой 10 Гц, реализует конечный автомат:
#TODO сделать хорошую картинку конечного автомата
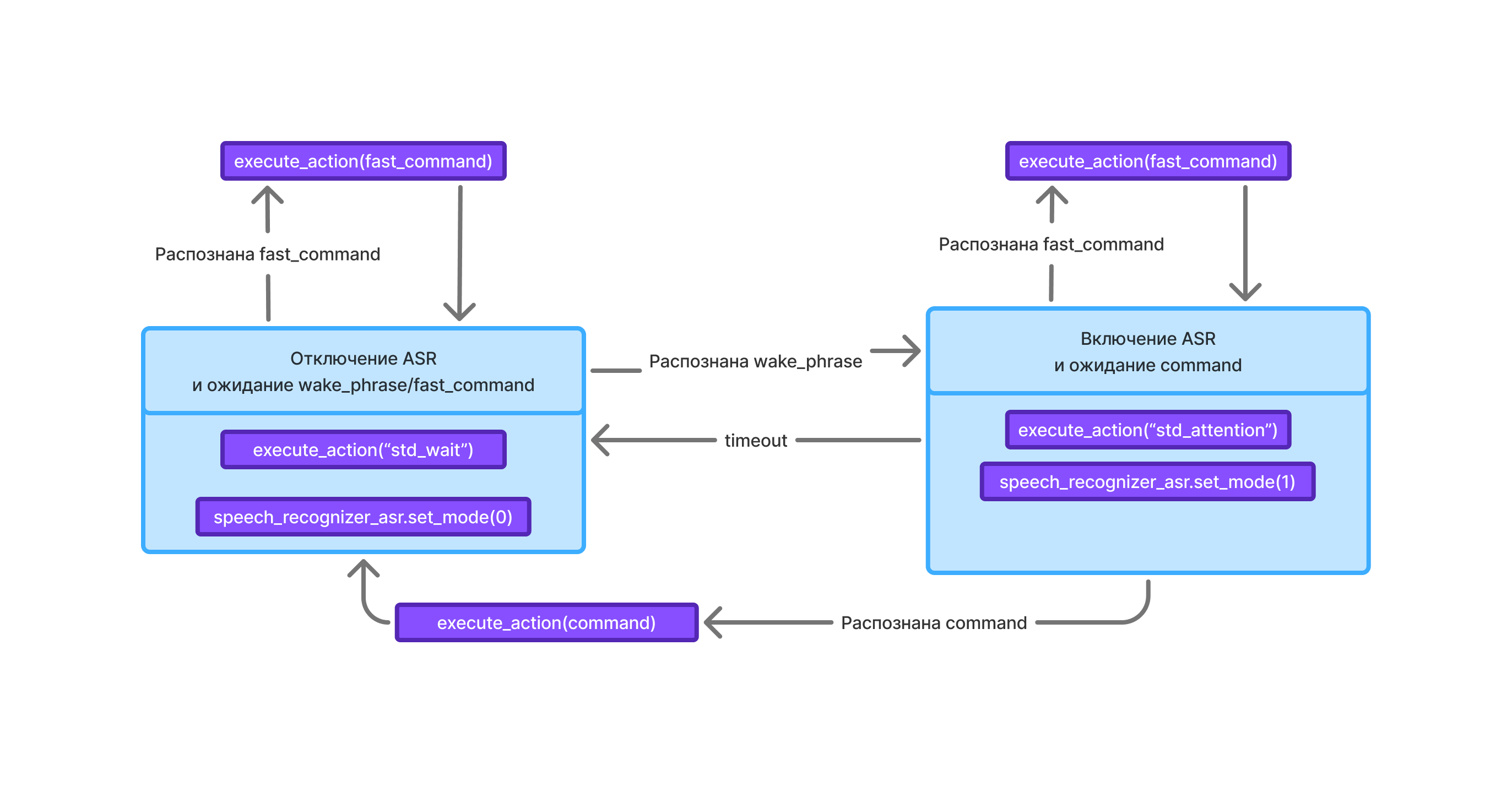
Быстрые команды обрабатываются в любом состоянии без прерывания текущего действия (cancelling=False).
Коннекторы драйверов
Каждый коннектор — обёртка над ROS2 клиентами/подписчиками с поддержкой cancel_event и блокирующего/неблокирующего режима.
EarsDriverConnector
| Метод | Описание |
|---|---|
connect() | Подключение к сервисам ears_set_angle, is_idle |
set_angle(cancel_event, left, right, duration, block) | Установка углов ушей. block=True — ждать завершения движения |
is_idle(cancel_event) | Проверка завершения движения |
NeckDriverConnector
| Метод | Описание |
|---|---|
connect() | Подключение к сервисам neck_set_angle, is_idle |
set_angle(cancel_event, vertical, horizontal, duration, block) | Установка углов шеи. block=True — ждать завершения |
is_idle(cancel_event) | Проверка завершения движения |
MediaDriverConnector
| Метод | Описание |
|---|---|
connect() | Подключение ко всем сервисам и топикам media_driver |
play_media(cancel_event, video_path, audio_path, loop, block) | Воспроизведение видео + аудио |
play_audio(cancel_event, audio_path, loop, block) | Воспроизведение только аудио |
play_display(cancel_event, video_path, loop, block) | Отображение только видео/изображения |
set_volume(cancel_event, volume) | Установка громкости (0–100) |
get_volume(cancel_event) | Получение текущей громкости |
is_idle_audio(cancel_event) | Проверка завершения аудио |
is_idle_display(cancel_event) | Проверка завершения видео |
stream_publish(image_msg) | Публикация кадра в стрим |
SensorDriverConnector
| Метод/Поле | Описание |
|---|---|
connect() | Подписка на топик battery |
battery_voltage | Текущее напряжение (В) |
battery_current | Текущий ток (А) |
battery_power_supply_status | Статус питания |
battery_power_supply_technology | Тип АКБ (Li-Ion) |
battery_state | "Сырое" сообщение BatteryState |
RespeakerDriverConnector
| Метод/Поле | Описание |
|---|---|
connect() | Подключение к сервисам LED и подписка на DOA, аудио |
doa | Текущий угол DOA (градусы) |
audio_main | Последний аудиофрейм основного канала |
set_led_mode(cancel_event, mode) | Устанавливает режим работы LED-кольца |
set_led_brightness(cancel_event, value) | Устанавливает яркость LED-кольца |
set_led_color_all(cancel_event, red, green, blue) | Устанавливает одинаковый цвет всем светодиодам LED-кольца |
set_led_color_palette(cancel_event, red_a, green_a, blue_a, red_b, green_b, blue_b) | Устанавливает двухцветную палитру для анимационных режимов LED |
set_led_color_manual(cancel_event, colors) | Устанавливает каждому (из 12) светодиоду LED-кольца отдельный цвет |
SpeechRecognizerAsrConnector
| Метод | Описание |
|---|---|
connect() | Подключение к сервису set_mode и подписка на commands, frees |
set_mode(mode) | Установка режима ASR (0/1/2) |
Колбэк commands | Полученные команды добавляются в controller.queue_commands |
Колбэк frees | Полученные команды добавляются в controller.queue_frees |
SpeechRecognizerKwsConnector
| Метод | Описание |
|---|---|
connect() | Подключение к сервису set_mode и подписка на wake_phrases, fast_commands |
set_mode(mode) | Установка режима KWS (0/1) |
Колбэк wake_phrases | Полученные фразы добавляются в controller.queue_wake_phrases |
Колбэк fast_commands | Полученные команды добавляются в controller.queue_fast_commands |
UsbCamConnector
| Метод/Поле | Описание |
|---|---|
connect() | Подписка на топик image_raw |
image_raw | Последний кадр с камеры (sensor_msgs/msg/Image) |
Система действий (Actions)
Структура действия
Каждое действие — Python-файл с функцией run():
def run(controller, action_name: str, cancel_event: threading.Event):
"""
Args:
controller: Ссылка на RoboheadController (доступ ко всем драйверам)
action_name: Имя действия (строка). Совпадает с командой, которой был вызван этот action.
cancel_event: threading.Event для проверки отмены
"""
# Логика действия...
Правила написания действий
- Периодически проверять
cancel_event.is_set()— для корректной отмены. Методы коннекторов драйверов делают внутри себя это за вас. Обращайте на это внимание при написании длительных операций (длительные циклы, time.sleep (не рекомендуется) и т.д.). - Передавать
cancel_eventво все вызовы драйверов. - Не использовать
time.sleep()напрямую — использоватьcontroller.sleep(cancel_event, duration)или собственную обёртку с проверкой отмены. - Ошибки в действиях изолированы — не приводят к падению контроллера.
Стандартные действия
| Имя | Файл | Описание |
|---|---|---|
std_startup | actions/std_startup/action.py | Стартовое приветствие: воспроизведение видео и аудио при запуске |
std_wait | actions/std_wait/action.py | Режим ожидания: зацикленная анимация на дисплее, остановка аудио, уши и шея в нейтральное положение |
std_attention | actions/std_attention/action.py | Реакция на wake phrase: анимация внимания, поворот головы к источнику звука (DOA), движение ушей |
std_low_bat | actions/std_low_bat/action.py | Реакция на низкий заряд батареи |
std_ears | actions/std_ears/action.py | Демонстрация ушей: анимация с поочерёдным движением ушей и покачиванием головы |
std_greeting | actions/std_greeting/action.py | Приветствие по голосовой команде |
std_ball_tracker | actions/std_ball_tracker/action.py | Слежение за шариком с камеры |
std_make_photo | actions/std_make_photo/action.py | Фотографирование с камеры |
std_left_ear | actions/std_left_ear/action.py | Демонстрация левого уха |
std_right_ear | actions/std_right_ear/action.py | Демонстрация правого уха |
std_show_voltage | actions/std_show_voltage/action.py | Показывает текущие напряжение и ток на АКБ |
std_echo | actions/std_echo/action.py | Записывает вашу речь и повторяет своим голосом |
std_llm | actions/std_llm/action.py | Распознает ваш вопрос и отправляет большой языковой модели, полученный от неё ответ озвучивается |
Быстрые действия (Fast Actions)
Выполняются без прерывания текущего действия (cancelling=False). Используются для команд, которые должны сработать мгновенно. Для их вызова обращаться к роботу ("Слушай, Робот!") не нужно!
| Имя | Файл | Описание |
|---|---|---|
громче | fast_actions/std_volume_up/action.py | Увеличение громкости на 10%. При достижении максимума — звуковое уведомление |
тише | fast_actions/std_volume_down/action.py | Уменьшение громкости на 10% |
Маппинг действий (actions_match)
Соответствие между именем команды и Python-скриптом задаётся в конфиге как JSON:
actions_match: >
{
"std_startup": "std_startup/action.py",
"std_wait": "std_wait/action.py",
"поздоровайся": "std_greeting/action.py",
"покажи уши": "std_ears/action.py",
"громче": "std_volume_up/action.py"
}
- Относительные пути разрешаются от
robohead_controller/actions/. - Абсолютные пути используются как есть.
- Ключи должны совпадать с командами в
speech_recognizer_asr.yaml(commands) иspeech_recognizer_kws.yaml(fast_commands).
Параметры конфигурации
Файл: config/robohead_controller.yaml
Основные параметры
| Параметр | Тип | По умолчанию | Описание |
|---|---|---|---|
low_voltage_threshold | float | 6.3 | Порог низкого напряжения батареи (В). Ниже — запуск std_low_bat |
low_voltage_hysteresis | float | 0.5 | Гистерезис восстановления (В). Работа разрешается при voltage ≥ threshold + hysteresis |
wait_timeout | float | 1.0 | Таймаут ожидания доступности сервисов при подключении (сек) |
actions_match | string (JSON) | "{}" | JSON-маппинг: имя команды → путь к скрипту действия |
Имена сервисов и топиков драйверов
Конфиг содержит полные имена (с namespace) всех сервисов и топиков для подключения к драйверам:
media_driver:
srv_play_media_name: "/robohead/media_driver/play_media"
# ...
ears_driver:
srv_ears_set_angle_name: "/robohead/ears_driver/ears_set_angle"
# ...
neck_driver:
srv_neck_set_angle_name: "/robohead/neck_driver/neck_set_angle"
# ...
respeaker_driver:
topic_name:
doa: "/robohead/respeaker_driver/doa"
# ...
service_name:
set_mode: "/robohead/respeaker_driver/set_mode"
# ...
sensor_driver:
topic_name: "/robohead/sensor_driver/battery"
speech_recognizer_asr:
service_name:
set_mode: "/robohead/speech_recognizer/asr/set_mode"
topic_name:
commands: "/robohead/speech_recognizer/asr/commands"
speech_recognizer_kws:
service_name:
set_mode: "/robohead/speech_recognizer/kws/set_mode"
topic_name:
wake_phrases: "/robohead/speech_recognizer/kws/wake_phrases"
fast_commands: "/robohead/speech_recognizer/kws/fast_commands"
usb_cam:
topic_name_image_raw: "/robohead/usb_cam/image_raw"
Launch-файлы
robohead_controller.launch.py — Полный запуск
Запускает все драйверы и контроллер:
ros2 launch robohead_controller robohead_controller.launch.py
Эта же команда запускается из скрипта ~/start.sh, который вызывается автоматически при запуске Rasperry Pi сервисом robohead.service
Последовательность:
dependencies.launch.py— запуск всех драйверов.robohead_controller— запуск контроллера.
dependencies.launch.py — Только драйверы
Запускает все драйверы без контроллера (для отладки):
ros2 launch robohead_controller dependencies.launch.py
Запускаемые ноды (namespace /robohead/):
| Нода | Пакет | Namespace |
|---|---|---|
media_driver_node | media_driver | /robohead/media_driver/ |
neck_driver | neck_driver | /robohead/neck_driver/ |
sensor_driver | sensor_driver | /robohead/sensor_driver/ |
ears_driver | ears_driver | /robohead/ears_driver/ |
usb_cam | usb_cam | /robohead/usb_cam/ |
respeaker_driver | respeaker_driver | /robohead/respeaker_driver/ |
speech_recognizer_kws_node | speech_recognizer | /robohead/speech_recognizer/kws/ |
speech_recognizer_asr_node | speech_recognizer | /robohead/speech_recognizer/asr/ |
Пример создания нового действия
- Создать папку действия в
robohead_controller/robohead_controller/actions/и скриптaction.py - Добавить в маппинг (
robohead_controller.yaml) - Добавить команду в ASR (
speech_recognizer_asr.yaml) - Пересобрать и запустить
colcon build --symlink-install --packages-select robohead_controller speech_recognizer
ros2 launch robohead_controller robohead_controller.launch.py
Сборка
colcon build --symlink-install --packages-select robohead_interfaces robohead_controller
Запуск
# Полный запуск (драйверы + контроллер)
ros2 launch robohead_controller robohead_controller.launch.py
# Только драйверы (для отладки)
ros2 launch robohead_controller dependencies.launch.py