Основые возможности
Роботизированная голова Bbrain готова к работе сразу после включения и поддерживает интерактивное управление голосом. После включения Робоголова произносит "Ну привет!" и переходит в режим ожидания голосовой команды. На дисплее анимация:
🗣 Выполнение предустановленных (стандартных) голосовых команд
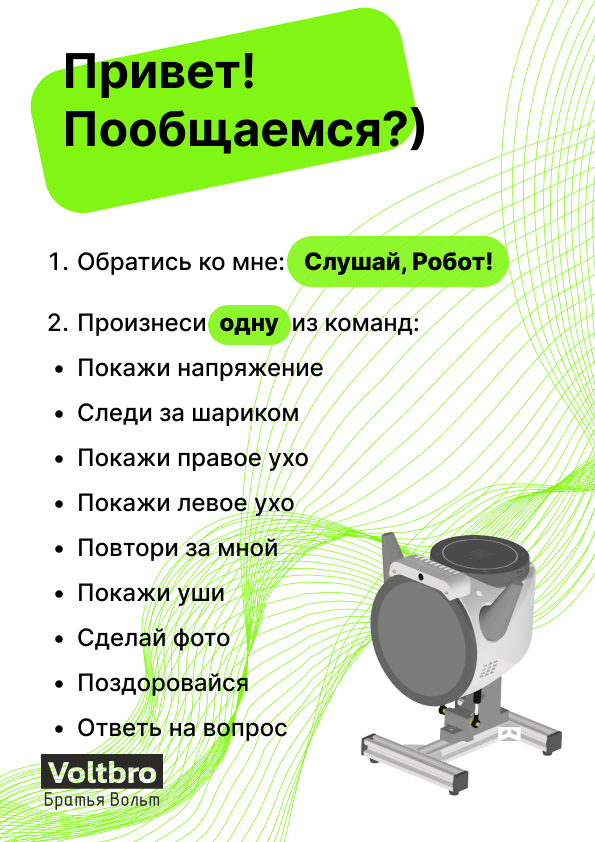
Для активации режима прослушивания голосовой команды необходимо произнести ключевую фразу:
Слушай, Робот!
После активации Робоголова:
- поворачивается к говорящему;
- меняет выражение лица;
- ожидает дальнейшую команду.
Произносить голосовые команды необходимо после ключевой фразы
Пример:
Слушай, Робот! Покажи левое ухо
Таблица стандартных голосовых команд
| Голосовая команда | Действие Робоголовы | Изображение на дисплее |
|---|---|---|
| «Покажи левое ухо» | Движение левым ухом и озвучивание фразы: «Левое ухо» |  |
| «Покажи правое ухо» | Движение правым ухом и озвучивание фразы: «Правое» |  |
| «Покажи уши» | Одновременное движение обоими ушами и озвучивание фразы: «Ухи мои ухи» |  |
| «Поздоровайся» | Кивание и озвучивание фразы: «Ну привет» |  |
| «Сделай фото» | Показ изображения с камеры с обратным отсчётом | Изображение с камеры Робоголовы |
| «Следи за шариком» | Калибровка цвета (5 секунд) и слежение за цветным объектом (15 секунд) | Изображение с камеры Робоголовы с выделенным калибровочным контуром и распознанным шариком |
| "Повтори за мной" | Произносит "Я вас слушаю" -> Записывает то, что вы говорите -> Повторяет ваши слова своим голосом |   |
| "Покажи напряжение" | Показывает текущее напряжение (В) и ток (А) на АКБ. Положительный ток = зарядка, отрицательный ток = разрядка | 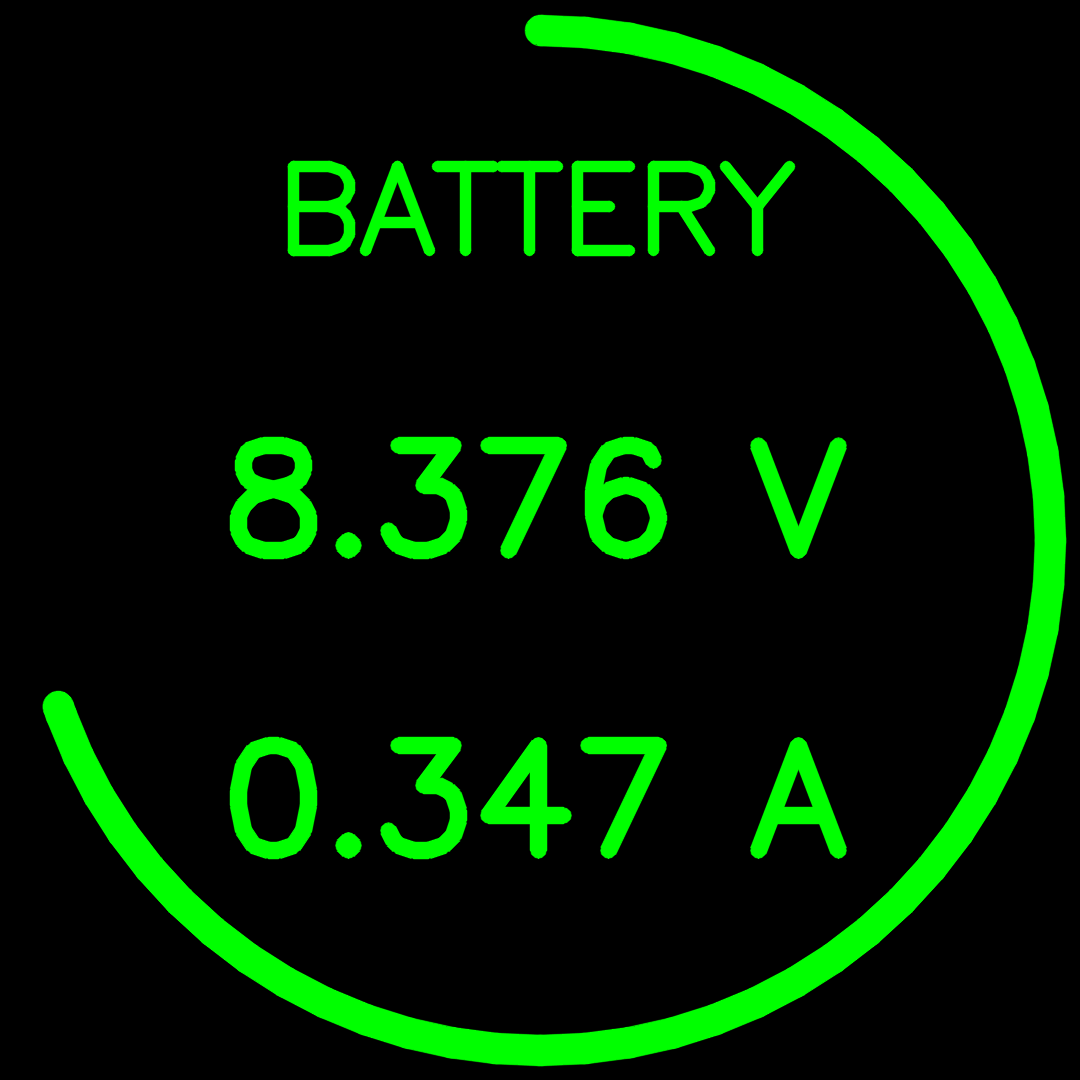 |
| "Ответь на вопрос" | Записывает ваш вопрос и отправляет большой языковой модели, чтобы получить ответ, далее ответ озвучивается. ВАЖНО: Требует дополнительной настройки! |  |
Говорите чётко, на расстоянии 0.5–1.5 метра. Постарайтесь избегать фонового шума.
Список всех доступных команд
🎤 Система распознавания речи
Робоголова Bbrain использует Vosk — лёгкую и эффективную систему распознавания речи с открытым исходным кодом, оптимизированную для работы на Raspberry Pi. Этот движок поддерживает русский язык и позволяет точно определять голосовые команды, даже если они произнесены с небольшими вариациями.
За чёткое улавливание речи отвечает микрофонный массив ReSpeaker XVF3800. Благодаря нескольким микрофонам он:
- определяет направление звука и автоматически поворачивает голову в сторону говорящего;
- снижает влияние фоновых помех с помощью встроенных алгоритмов шумоподавления.
Особенности работы:
- Лучше всего распознаёт команды, произнесённые чётко и в умеренном темпе на расстоянии 0,5–1,5 метра.
- В шумной среде (например, в классе) рекомендуется говорить ближе к устройству.
- Поддерживает ограниченный набор фраз (предустановленные команды), но его можно расширить через конфигурационные файлы или активировав режим искуственного интеллекта.
🔋 Контроль заряда аккумулятора
- При напряжении аккумуляторной сборки ниже 6.3 В:
- выполнение всех команд блокируется;
- на дисплее появляется предупреждение.
- Для восстановления работы:
- зарядите аккумуляторы или подключите внешнее питание;
- после достижения напряжения выше 6.8 В команды разблокируются автоматически.
✨ Возможность расширения набора действий
Устройство предоставляет широкие возможности для создания собственных голосовых команд и интерактивных сценариев с использованием всех компонентов:
- 🗣 Голосовые команды — добавление новых фраз для активации действий.
- 🔈 Динамики — воспроизведение пользовательских аудиофайлов (приветствия, звуковые эффекты, ответы).
- 🔄 Сервоприводы шеи и ушей — программирование плавных движений с точным контролем углов.
- 🖥 Круглый дисплей — вывод анимаций, изображений или текстовых сообщений, распознавание касаний.
- 📷 Камера — обработка изображений (распознавание объектов или лиц) и реакция на визуальные стимулы.
Программирование на Python
Все пользовательские сценарии разрабатываются через ROS-пакеты и/или специальную обёртку на языке Python, что обеспечивает простую интеграцию с аппаратной частью. Например, можно:
- Создать команду, при которой Робоголова будет поворачиваться к человеку и произносить его имя при распознавании лица.
- Запрограммировать сложную последовательность движений в такт музыке.
- Настроить реакцию на внешние события (например, хлопок или цветной объект в кадре).
Для начала достаточно базового знания Python. Готовые примеры скриптов и шаблоны конфигурационных файлов доступны в инструкции.
🤖 Интеграция с другими роботами
Робоголова Bbrain может работать в составе единой ROS-сети вместе с другими роботами проекта «Братья Вольт» — настольным образовательным роботом TurtleBro2 и четвероногой робособакой МОРС. Это позволяет создавать сложные сценарии взаимодействия, где устройства дополняют друг друга.
TODO (всё, что ниже)
Совместная работа с TurtleBro2
Через пакет turtlebro2_voice_nav Робоголова передаёт голосовые команды для управления движением TurtleBro2.
- Пример: фраза «Слушай, Робот! Езжай в кабинет» заставляет TurtleBro2 ехать в координату с названием "Кабинет", а «Осмотрись» — поворачиваться вправо/влево и передавать изображение с камеры робота на дисплей Робоголовы.
Управление робособакой МОРС
- Поддержка команд управления походкой и движениями:
- «Сидеть» — МОРС принимает положение «сидя».
- «Лежать» — МОРС принимает положение «лёжа».
- «Повернись влево» и «Повернись вправо» — поворот МОРСа на 90 градусов влево и вправо, соответственно.
- «Иди вперёд» — МОРС проходит немного вперёд.
- «Дай лапу» — МОРС подаёт лапу.
- Совместные сценарии:
- Робоголова анализирует объекты перед собой и управляет МОРСом для поиска нужного предмета (например, следит за шариком).